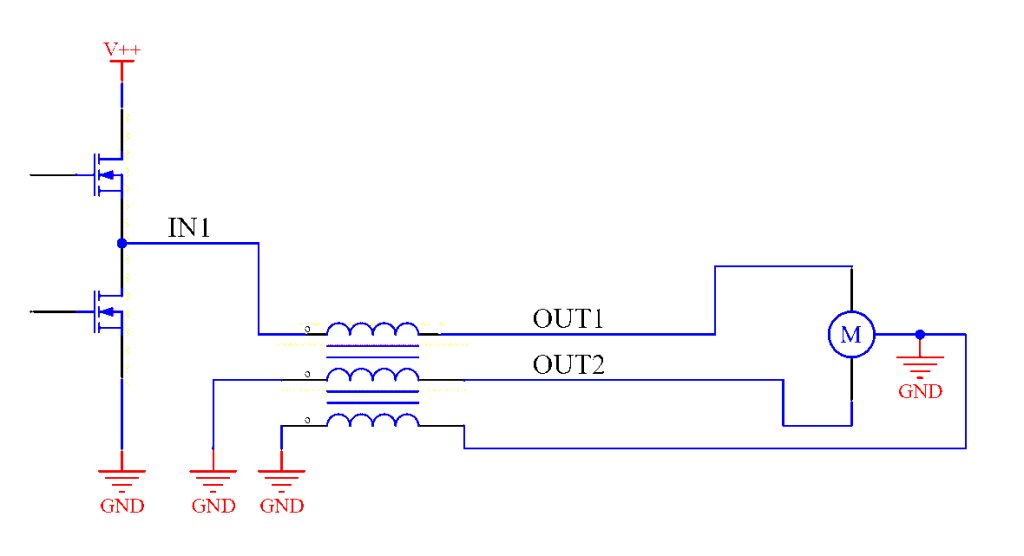
Now lets see what happens if the chassis IS connected at both the driver and to the motor. The ferrite will “attempt” to minimize the net change in current through the bead. In this example, a 100 ohm bead is used (100 ohms at 10MHz). The current from the step on IN1 will cause a small negative voltage on the output side of the shield conductor, such that most of the current capacitively coupled to the motor stator will be drawn back through the shield.
To greatly simplify: current that passes in one direction has to pay the 100 ohm toll (bead impedance) to flow, while that current which returns back though the bead does not pay the 100 ohm toll as the magnetic fields produced by the two wires will cancel. This makes the return path through the shield going through the ferrite bead the much preferred path.
Actual testing in a system with a hybrid motor showed the current to the chassis without the shield connection was on the order of 1A with a fast switching driver. The current through the chassis dropped to approximately 20 mA with the shield grounded and a ferrite bead over the whole cable – about a 35dB improvement! Almost 98% of the current returned by the preferred path. This is especially true at higher frequencies, which are also the most likely to radiate.
Looking at the bead as providing a 100 ohm impedance to the net current, the current that passes out through the bead to the motor and to the chassis which then bypasses the bead sees 100 ohms, while the current that returns through the shield, back through the bead cancels the field from the outgoing current, and thus returns with no “impedance toll” having to be paid.
Simply grounding the shield at both sides without the presence of the ferrite bead would provide a path for some of the current coupled from the coils to the stator to return back to the driver. This is a preferred return as the area of the resulting loop (driver ground, to driver, to wire to motor coil, to stator, to shield, to driver ground) is very small as the shield surrounds the driven wires. However, the current divides according to the impedance of both paths, and the chassis commonly as a lower impedance.
Another way of looking at this is the reverse drop across the shield is “pulling” the current injected by the switching phase charging the winding capacitance back through the shield (as well as the rest of the driver lines). The impedance “toll bridge” of the ferrite bead only applies to one-way currents, not to balanced currents.
As to circulating currents from the ground loop, these see the bead impedance, and thus are significantly attenuated – the Bead breaks the loop at high frequencies. The optional series capacitor will break the loop at DC and low frequencies if that is an issue in your system.
So, Balun or Shield with Bead?
My experience is that if you must choose one, the shield and the bead does more than the Balun alone to reduce noise. However, you are free to choose both. A small through board U and I core close to the drivers but capturing all of the driver lines can make a small but effective balun while still using a shielded cable with a bead to the motor.
What Beads Should I Use?
I have primarily used Type 31 suppression ferrite as well as type 43 suppression ferrite materials from Fair-rite, but there are many ferrite sources. Lossy ferrites are useful in that they convert the noise into heat rather than just reflecting the energy or resonating it. A small amount of heat is vastly preferable to radio emissions or coupling switching noise into other nearby circuits.
QuickSilver Controls uses multiple techniques to reduce noise allowing use of our products in RF sensitive environments as well as in high RF environments such as RF susceptibility test chambers. These techniques also allow QCI to use single cables for both motor signals and encoder signals, tested to 200 feet (61 meters), although we normally suggest shorter runs.
Howdy! I simply would like to offer you a huge thumbs up for the excellent information you have here on this post.
I am coming back to your web site for more soon.
Reading your post is like a journey through a picturesque landscape of thought – full of color, depth, and light! If you ever decide to publish a book, you’ll surely find a devoted audience waiting for it!